
Datasets
🌍 Predicting Geoattributes with Street-Level Images
Dataset for predicting geoattributes using Mapillary street-level images.
☁️ Cloud Removal in Satellite Imagery
Paired and unpaired cloudy and cloud-free satellite images for training generative models to remove clouds.
🚗 Synthetic Aerial Vehicle Classification Dataset
A synthetic dataset for aerial vehicle detection and classification, designed for Wide Area Motion Imagery (WAMI) applications.
Overview
| Attribute | Details |
|---|---|
| Total Samples | 55,226 images |
| Resolution | 64×64 px |
| Classes | Vehicle (27,613) • Background (27,613) |
| Ground Sampling Distance | ~0.3m |
| Generator | DIRSIG (Rochester Institute of Technology) |
Download
📥 DIRSIG Training + WAMI Validation Images
Contents:
train_dirsig/— Synthetic images + labelsvalidation_wami/— 600 real WAMI images + labels
Sample Images
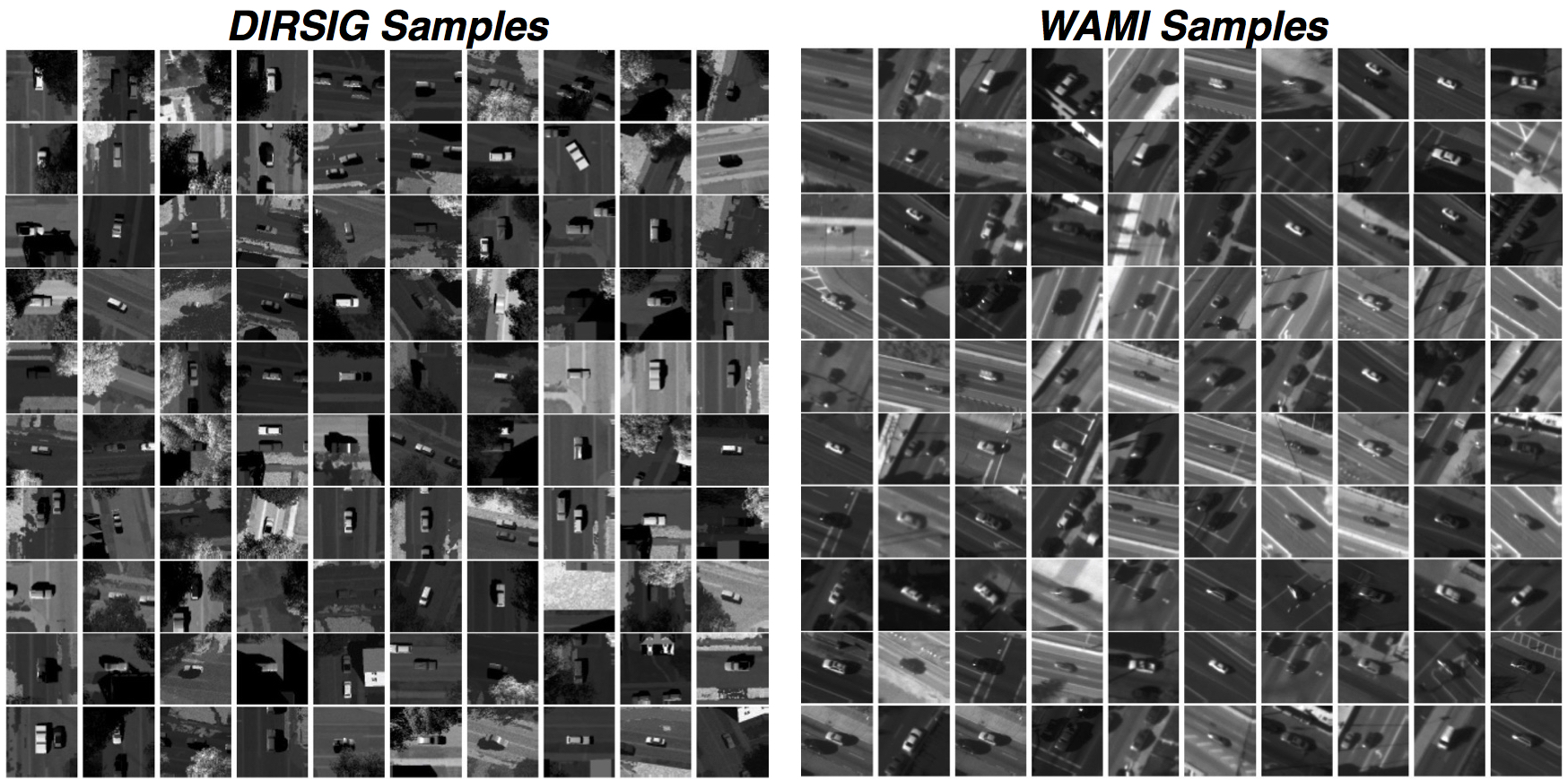 Left: DIRSIG synthetic samples | Right: WAMI validation samples
Left: DIRSIG synthetic samples | Right: WAMI validation samples
Citation
```bibtex @article{uzkent2017tracking, title={Tracking in Aerial Hyperspectral Videos using Deep Kernelized Correlation Filters}, author={Uzkent, Burak and Rangnekar, Aneesh and Hoffman, Matthew J}, journal={arXiv preprint arXiv:1711.07235}, year={2017} }